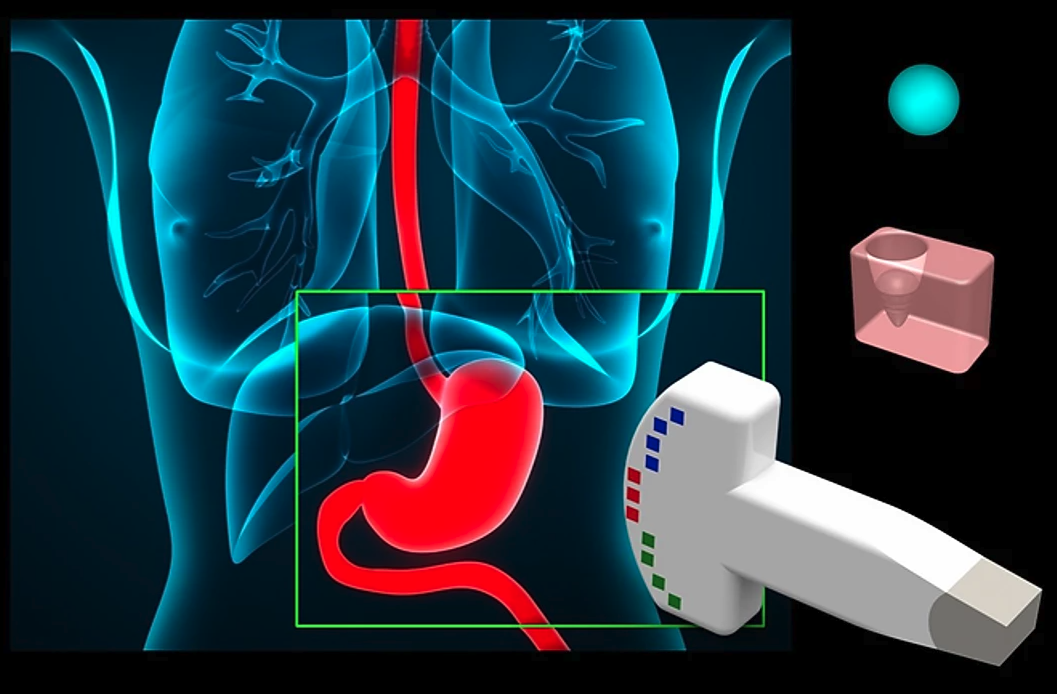
Our goal is to build novel multifunctional acoustic manipulation systems that will be compatible with in vivo animal models. We will take advantages of the acoustic radiation force, estimated by the gradient of the Gor’kov potential, to develop ultrasound manipulation systems.