Micro and Nanorobots
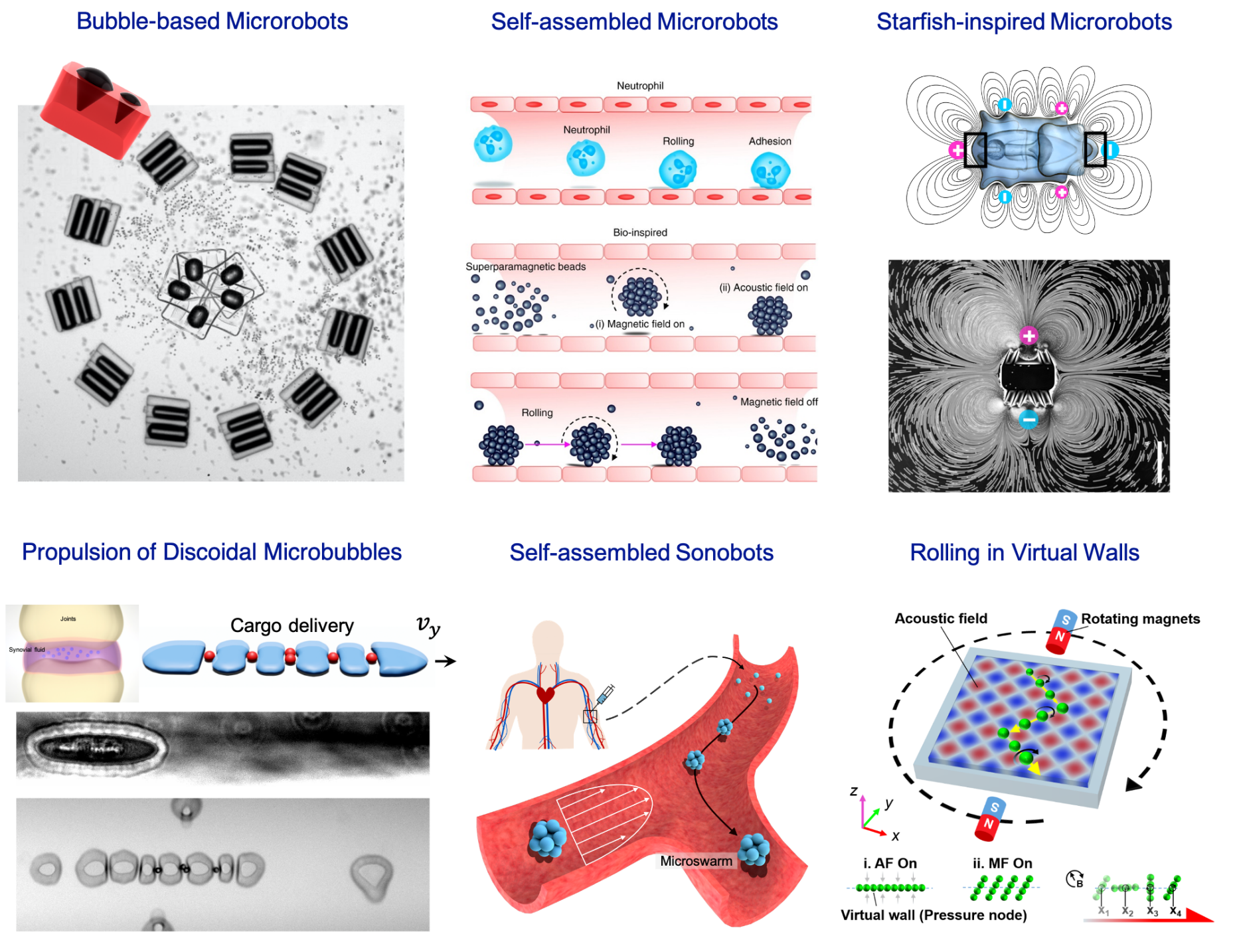
Micro and nanorobots can play a vital role in transforming medicine. However, designing microrobots at the microscale is challenging due to the lack of inertia that exists at this scale. One of our strategic areas is the development of new propulsion systems using ultrasound. We study the fundamentals of propulsion mechanism and apply them in the biomedical field.
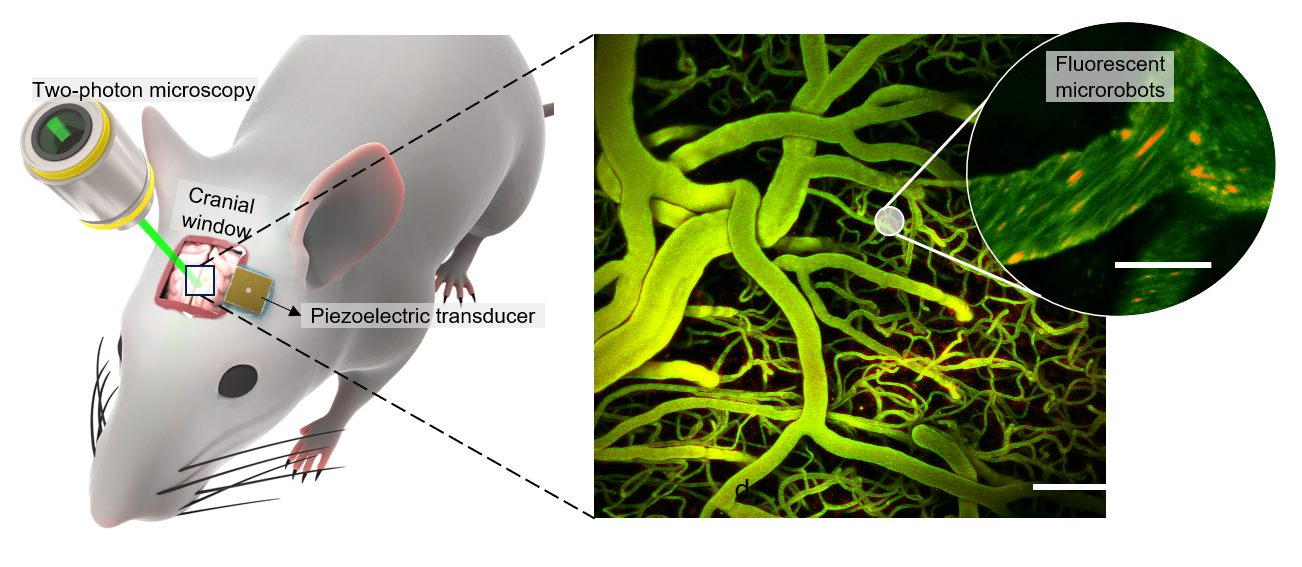
We introduce ultrasound-activated microrobots for in vivo navigation in brain vasculature. Our microrobots consist of lipid-shelled microbubbles that autonomously aggregate and propel under ultrasound irradiation. We investigate their capacities in vitro within microfluidic-based vasculatures and in vivo within vessels of a living mouse brain. These microrobots self-assemble and execute upstream motion in brain vasculature, achieving velocities up to 1.5 µm/s and moving against blood flows of ~10 mm/s. This work represents a substantial advance towards the therapeutic application of microrobots within the complex brain vasculature